
研究代表者:明石 卓也
目的
ロボットビジョンとは,人間が物を見て理解する能力をロボットにもたせる技術のことであり,多くの研究分野で必要とされています.本グループでは,研究者同士の双方向のコミュニケーションを円滑にし,ロボットビジョン研究者と他研究分野の研究者によって,新たな価値を創造することを目的とし,複数の融合プロジェクトを推進します。
![]()
構成員:16名(2018年5月現在)
明石 卓也、 萩原 義裕、 木村 彰男、 藤本 忠博、 盧 忻、 今野 晃市、
三好 扶、 金 天海、 松林 由里子、 田中 隆充、 本村 健太、 武田 純一、
澤村 省逸、 吉森 久、 永田 仁史、 山中 克久
![]()
研究概要
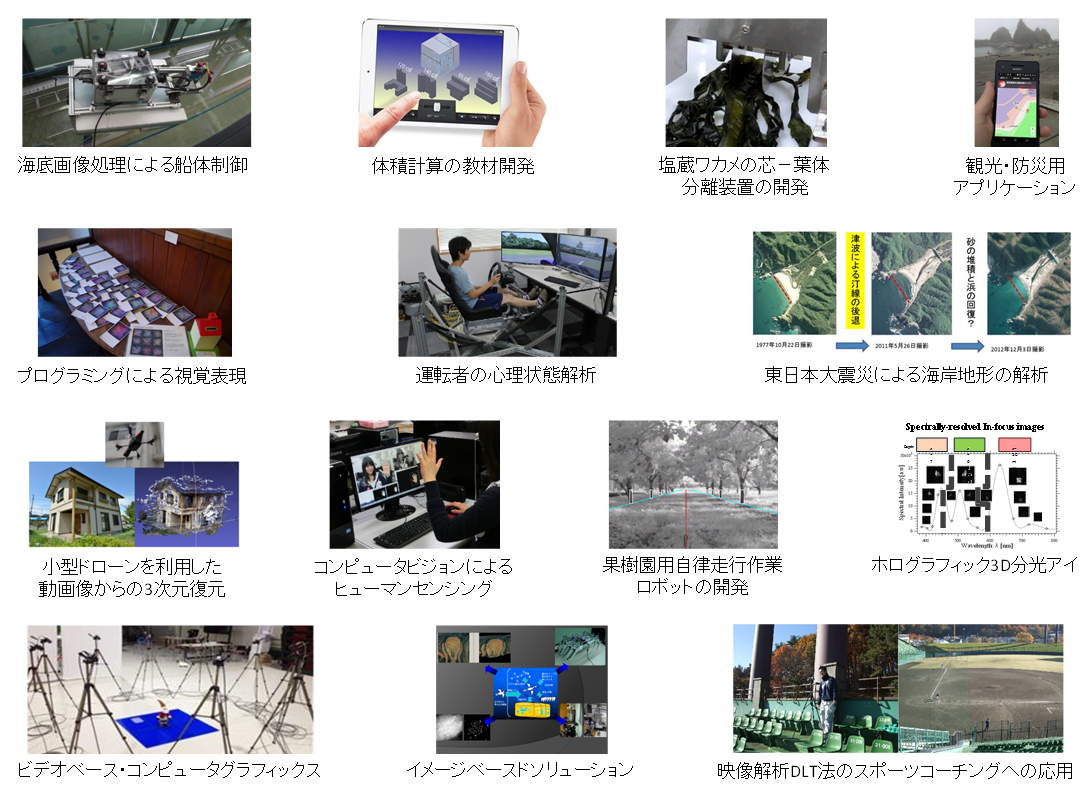
進化計算を用いたコンピュータビジョン(明石)
高精度・高生産性・低コストの画像・信号処理システムに関する研究(萩原)
画像処理及びパターン認識アルゴリズムに関する研究(木村)
ビデオベース・コンピュータグラフィックスに関する研究(藤本)
確率的な解析手法を用いた物体追跡法に関する研究(盧)
点群ベース形状モデリングに関する研究(今野)
ロボット技術を用いたリハビリテーションシステムに関する研究(三好)
小型船舶の自律安定化に関する研究(金)
氷海の波浪伝播のシミュレーションに関する研究(松林)
視覚的概念表現を用いた技術シーズをニーズへと展開させる方法の研究(田中)
映像メディア表現に関する研究(本村)
農作業の自動化・自律走行技術に関する研究(武田)
野球の競技力に関するコーチ学的研究(澤村)
ホログラフィック3D分光アイ(吉森)
![]()
研究実績
![]()